En el boton de texto podran ver un video de Youtube explicando que es la estatica.
CAPÍTULO 1
La mecánica se define como la ciencia que estudia los cuerpos en reposo o en movimiento bajo una fuerza. Se divide en 3: cuerpos rígidos, cuerpos deformables y fluidos.
La primera antes mencionada se divide en estática y dinámica. La primera estudia los cuerpos en reposo mientras que la otra estudia los cuerpos en movimiento y es muy importante saber que en esta división de la mecánica los cuerpos son rígidos como su nombre lo dice, pero en la vida real esto no sucede lo que sucede es que los cuerpos llegan a tener pequeñas deformaciones y estas no son capaces de realizar un cambio en el equilibrio y aquí es cuando entra la segunda división de la mecánica donde se estudian los cuerpos son estudiados respecto a sus deformaciones o a la resistencia a las fallas. La tercera parte de mecánica se divide en fluidos incompresibles y en compresibles.
La primera antes mencionada se divide en estática y dinámica. La primera estudia los cuerpos en reposo mientras que la otra estudia los cuerpos en movimiento y es muy importante saber que en esta división de la mecánica los cuerpos son rígidos como su nombre lo dice, pero en la vida real esto no sucede lo que sucede es que los cuerpos llegan a tener pequeñas deformaciones y estas no son capaces de realizar un cambio en el equilibrio y aquí es cuando entra la segunda división de la mecánica donde se estudian los cuerpos son estudiados respecto a sus deformaciones o a la resistencia a las fallas. La tercera parte de mecánica se divide en fluidos incompresibles y en compresibles.
historia
Su primer antecedente se remonta a la época de Aristóteles y de Arquímedes pero se tuvo que esperar hasta Newton que fue el primero en lograr algo interesante y la validez de sus principios duro hasta la época de Einstein pero cabe decir que Newton no logro mucho por las limitaciones de su época.
CONCEPTOS BÁSICOS
Espacio: Se asocia con un punto P y el cual tiene tres
direcciones dadas a partir del origen P.
Tiempo: Se refiere al momento en que ocurrió el evento.
Masa: Tiene la función de caracterizar y comparar los cuerpos. Saber si ellos tienen la misma masa seria lanzarlos y si caen al mismo tiempo seria la misma masa.
Fuerza: Es la acción de un cuerpo sobre otro con contacto real o a distancia, la segunda como las fuerzas gravitatorias o magnéticas.
Tiempo: Se refiere al momento en que ocurrió el evento.
Masa: Tiene la función de caracterizar y comparar los cuerpos. Saber si ellos tienen la misma masa seria lanzarlos y si caen al mismo tiempo seria la misma masa.
Fuerza: Es la acción de un cuerpo sobre otro con contacto real o a distancia, la segunda como las fuerzas gravitatorias o magnéticas.
LEYES
La Ley del Paralelogramo para la Adición de Fuerzas
Se define como la posible sustitución de dos fuerzas que ejercen sobre una partícula y como antes fue mencionado sustituidas por una fuerza resultante que es igual a las dos fuerzas.
El principio de Transmisibilidad
Se define cuando un cuerpo mantiene las condiciones de equilibrio si estas se mantienen inalteradas si este se sustituye por una fuerza.
Se define como la posible sustitución de dos fuerzas que ejercen sobre una partícula y como antes fue mencionado sustituidas por una fuerza resultante que es igual a las dos fuerzas.
El principio de Transmisibilidad
Se define cuando un cuerpo mantiene las condiciones de equilibrio si estas se mantienen inalteradas si este se sustituye por una fuerza.
LEYES DE NEWTON
 Formula de la ley de Gravitación de Newton
Formula de la ley de Gravitación de Newton
Primera Ley: Se define como, la fuerza que actúa sobre la partícula es cero entonces la partícula permanecerá en reposo o en dado caso que hubiera estado en movimiento la rapidez se mantendrá constante.
Segunda Ley: Se define como si la fuerza resultante sobre la partícula no es cero entonces esta tendrá movimiento en dirección de la fuerza y con una aceleración igual a la fuerza.
F=m*a Siendo F fuerza(N), m masa (g) y a aceleración (m/s^2 )
Tercera Ley: Se define como la fuerza de acción y de reacción tienen la misma magnitud, sentidos opuestos y misma línea de acción, lo que quiere decir que por cada acción hay una reacción.
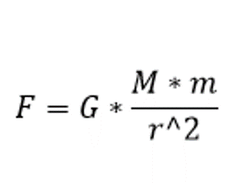
Ley de la Gravitación de Newton
Siendo G= constante de gravitación
M y m = masa de los dos cuerpos
r= distancia entre los dos cuerpos
Segunda Ley: Se define como si la fuerza resultante sobre la partícula no es cero entonces esta tendrá movimiento en dirección de la fuerza y con una aceleración igual a la fuerza.
F=m*a Siendo F fuerza(N), m masa (g) y a aceleración (m/s^2 )
Tercera Ley: Se define como la fuerza de acción y de reacción tienen la misma magnitud, sentidos opuestos y misma línea de acción, lo que quiere decir que por cada acción hay una reacción.
Ley de la Gravitación de Newton
Siendo G= constante de gravitación
M y m = masa de los dos cuerpos
r= distancia entre los dos cuerpos
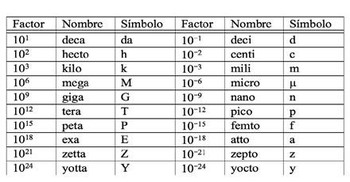
Sistema de Unidades
Como ya se habían mencionado antes las unidades básicas, se
usan unidades especiales para cada una las cuales son metro (m) para la longitud,
kilogramo (kg) para la masa y finalmente segundo (s) para el tiempo. El Newton que es la unidad de fuerza se
representa asi.
El sistema Internacional(métrico) las unidades básicas que usa son el masa, longitud , tiempo y la Fuerza que como antes se mencionaba pero ahora comparándolo con el sistema ingles que la Fuerza se mide en libra, la longitud en en pies y el tiempo igualmente en segundo y a diferencia la masa en slugs.
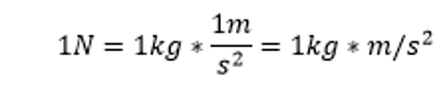
Como se logra sacar la unidad Newton.
Formula propia que no se pudo copiar
El SI
Se
usan muchas unidades en mecánica las cuales casi todas están regidas por el SI
y con esto ha habido diferencias con los estadounidenses puesto que su sistema
es diferente con otras unidades y a lo cual han tenido que aprender a
convertirlas.
WWW.CUBALITERARIA.CU
Exactitud
Numérica
Depende de dos cosas, datos proporcionados y cálculos desarrollados. En ingeniera los datos rara vez se conocen con exactitud y por esto se han implementado el apoyo de varias herramientas para el alumno de ingeniería o para el ingeniero que les pueden facilitar su trabajo que debe de ser eficiente.
Haz clic aquí para modificar.
CAPÍTULO 2
Fuerzas en un plano
 teleformacion.edu.aytolacoruna.es
teleformacion.edu.aytolacoruna.es
Una fuerza es la acción de un cuerpo sobre otro pero con un
punto de aplicación, magnitud y dirección. La magnitud se refiere a fuerza
aplicada e igual se usa con las unidades del SI. Está representada por una
línea y así mismo se coloca la unidad de la fuerza aplicada.
Vectores
 genesis.uag.mx
genesis.uag.mx
Se definen como expresiones matemáticas que poseen magnitud,
dirección y sentido, las cuales se verán afectadas por la ley del
paralelogramo. Un vector fijo o ligado es el cual no puede cambiar su posición
o modificar las condiciones del problema que se haya planteado pero hay otros
tipos de vectores que pueden moverse libremente en el espacio que se llaman
libres sin embargo hay otras que se mueven dentro de su línea de acción que se
conocen como deslizantes.
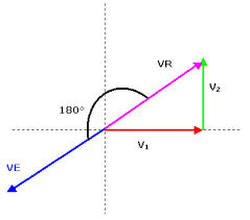
suma de vectores
Se puede sacar como antes se había mencionado por el método de paralelogramo que tenga B y C que son otros
vectores y estos se suman llevándonos a la suma de vectores que se puede
representar como:
B
+ C = C + P
Como se ve en la figura de abajo:
Como se ve en la figura de abajo:
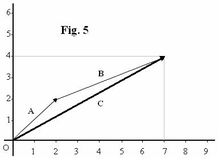
www.aulafacil.com
Pero es muy importante saber el sentido y con este el signo del vector para saber si se hara una suma o una resta para saber el vector resultante.
También se puede descomponer las fuerzas, lo que quiere decir es que se ponen desde el mismo punto de origen y con esto poder sacar la fuerza resultante.
También se puede descomponer las fuerzas, lo que quiere decir es que se ponen desde el mismo punto de origen y con esto poder sacar la fuerza resultante.
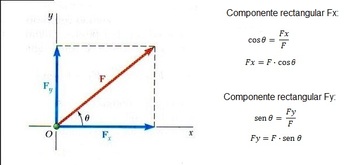
COMPONENTES RECTANGULARES
En la figura se puede ver un ejemplo de donde se descompone en sus dos vectores perpendiculares entre el vector F. y este tipo se le conoce como componentes rectangulares y tiene también como se sacaría respecto a cada uno de las componentes en x, y.
www.cienciasatlantico.blogsek.es
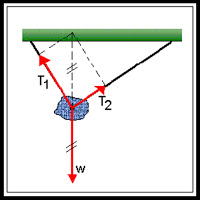
EQUILIBRIO DE UNA PARTÍCULA
Se define como si la suma o resultante de una partícula es
igual a cero entonces se puede decir que está se encuentra en equilibrio. También
sabemos que una partícula estará en equilibrio si las dos fuerzas que actúan sobre ellas tienen la
misma magnitud, la misma línea de acción y siempre y cuando tengan sentidos
opuestos.
R= sumF = 0
Descomponiendo cada fuerza pasa lo mismo cuando se cumpla esto:
sumFx= 0 y sumFy = 0
R= sumF = 0
Descomponiendo cada fuerza pasa lo mismo cuando se cumpla esto:
sumFx= 0 y sumFy = 0
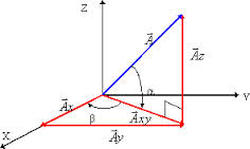
COMPONENTES RECTANGULARES DE UNA FUERZA EN EL ESPACIO
 estaticaortegamorenomo.blogspot.com
estaticaortegamorenomo.blogspot.com
Se define casi igual que la que pasa en 2D solo que aquí hay
un tercer plano conocido como “z” y aquí primero para sacar la magnitud de la
fuerza, así como sus componentes en cada uno de los ejes:
F= (Fx^2 + Fy^2 + Fz^2)^1/2
Fx= F cos (theta en x), Fy= F cos (theta en y), Fz= F cos (theta en z)
Y se representa con los vectores unitarios “i,j,k” y se representa como F = Fx “i” + Fy”j” + Fz”k”
F= (Fx^2 + Fy^2 + Fz^2)^1/2
Fx= F cos (theta en x), Fy= F cos (theta en y), Fz= F cos (theta en z)
Y se representa con los vectores unitarios “i,j,k” y se representa como F = Fx “i” + Fy”j” + Fz”k”
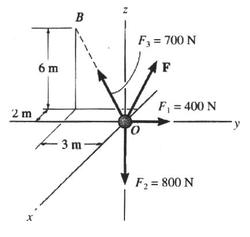
EQUILIBRIO DE UNA PARTÍCULA EN EL ESPACIO
 www.itsbasicas.com
www.itsbasicas.com
Como antes se mencionaba en 2 párrafos anteriores es cuando la fuerza resultante se encuentra en equilibrio puesto que las fuerzas que actúan son iguales solo que en este caso se encuentra en las tres dimensiones.
CAPITULO 3
FUERZAS EXTERNAS E INTERNAS
Las fuerzas externas representan toda acción ejercida por un cuerpo sobre el cuerpo rígido, son los que causan el comportamiento externo del cuerpo rígido. Estos ocasionan que el cuerpo se mueva o en dado caso que se mantenga en reposo. Un ejemplo sería un coche que se descompuso la fuerza externa seria la gente que está empujando el coche para que no estorbe la calle.
Las fuerzas internas son aquella que mantienen unidas a las partículas del cuerpo.
Las fuerzas internas son aquella que mantienen unidas a las partículas del cuerpo.
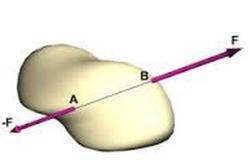
PRINCIPIO DE TRANSMISIBILIDAD. FUERZAS EQUIVALENTES
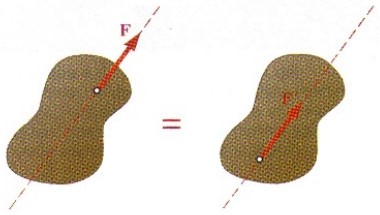
Se define como las condiciones de equilibrio de un cuerpo rígido
si una fuerza se reemplaza por otra que tiene la misma magnitud y dirección pero
que actúa en un punto distinto tiene el mismo efecto sobre el cuerpo y por esto
reciben el nombre de fuerzas equivalentes.
PRODUCTO VECTORIAL DE DOS VECTORES
Como se ve en la imagen es perpendicular a “v” y “u” y con la siguiente formula:
Donde “u” y “v” = P y Q
V=PQsen(theta) o con la formula V= P X Q
Donde “u” y “v” = P y Q
V=PQsen(theta) o con la formula V= P X Q
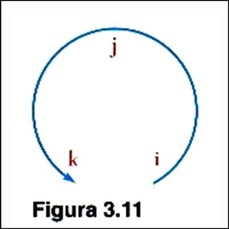
Como se ve en la imagen podemos concluir en :
i*i=0 i*j=k i*k=-j j*i=-k j*j=0
j*k=i k*i=j k*j=-i k*k=0
y con la formula V= P X Q se hace el producto cruz.
i*i=0 i*j=k i*k=-j j*i=-k j*j=0
j*k=i k*i=j k*j=-i k*k=0
y con la formula V= P X Q se hace el producto cruz.
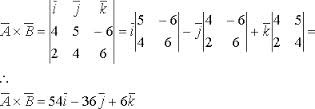
Y se resuelve como en la siguiente imagen:
Son muy fáciles de hacer siempre y cuando sepas los vales unitarios de cada uno de los vectores.
Son muy fáciles de hacer siempre y cuando sepas los vales unitarios de cada uno de los vectores.
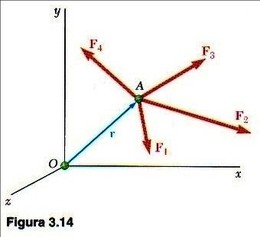
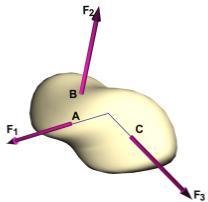
MOMENTO DE UNA FUERZA CON RESPECTO A UN PUNTO
El efecto de la fuerza sobre el cuerpo, el cual depende de
la posición del punto de aplicación.
Mo= r X F
Donde r= es el vector que une al punto de origen al punto A
F= la fuerza aplicada
Mo= r X F
Donde r= es el vector que une al punto de origen al punto A
F= la fuerza aplicada
TEOREMA DE VARIGNON
Se define como la propiedad distributiva de los productos
vectoriales se puede emplear para determinar el momento resultante de varias
fuerzas.
r X (F1 + F2 + F3 +…) = r X F1 + r X F2 + ….
r X (F1 + F2 + F3 +…) = r X F1 + r X F2 + ….
PRODUCTO ESCALAR DE DOS VECTORES
Se define como el producto de las magnitudes de P y Q y el coseno del angulo theta
P. Q = PQ cos (theta)
La cual se reduce a:
P. Q = PxQx + PyQy + PzQz
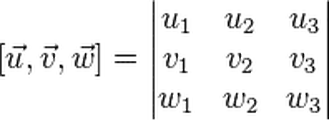
Para el triple producto de tres vectores se le añade una S donde la formula se transforma a S . ( P X Q) , para que sea mas fácil entenderle se ve en la siguiente figura.
P. Q = PQ cos (theta)
La cual se reduce a:
P. Q = PxQx + PyQy + PzQz
Para el triple producto de tres vectores se le añade una S donde la formula se transforma a S . ( P X Q) , para que sea mas fácil entenderle se ve en la siguiente figura.
MOMENTO DE UN PAR
Se define como dos fuerzas que tienen la misma magnitud, líneas
de acción paralelas y sentidos opuestos forman un par y la cual la suma será
igual a 0 sin embargo la suma de los momento de dos fuerzas no es cero puesto
que no la moverán pero si la harán rotar.
PARES EQUIVALENTES
Dos sistemas de fuerzas son equivalentes (mismo efecto) si
pueden transformar a uno de ellos en el otro por estas operaciones : quitar sus
fuerzas y colocar la resultante, descomponer una fuerza en dos componentes,
cancelar dos fuerzas iguales y opuestas, unir 2 fuerzas iguales y opuestas, mover
una fuerza a lo largo de una línea de acción.Los pares pueden representarse por medio de vectores.
CAPITULO 4
Equilibrio de cuerpos rígidos:
Es cuando la suma de momentos es igual a cero igual que la sumatoria de fuerzas.
Y esto debe de cumplirse igual si se descompone en sus componentes en x,y,z tanto en Momento como en Fuerza.
Para poder escribir las ecuaciones de equilibrio es esencial identificar todas las fuerzas ejercidas sobre el cuerpo, y así poder dibujar el diagrama de cuerpo libre.
Es cuando la suma de momentos es igual a cero igual que la sumatoria de fuerzas.
Y esto debe de cumplirse igual si se descompone en sus componentes en x,y,z tanto en Momento como en Fuerza.
Para poder escribir las ecuaciones de equilibrio es esencial identificar todas las fuerzas ejercidas sobre el cuerpo, y así poder dibujar el diagrama de cuerpo libre.
diagrama de cuerpo libre
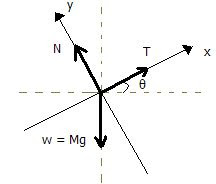
Como antes se mencionaba hacer el diagrama de cuerpo libre es esencial para calcular equilibrio y es muy importante tomar todas las fuerzas involucradas en el cuerpo de lo contrario jamas llegaremos al resultado correcto y con esto destruir el "equilibrio".
Pasos a seguir:
1.- Elegir adecuadamente el cuerpo que será utilizado, separarlo del suelo y de todos los demás cuerpos.
2.- Todas las demás fuerzas deberán estar incluidas en el diagrama, estas representan la acción ejercida sobre el objeto
3.- Las magnitudes y direcciones de las fuerzas externas, deben ser señaladas claramente.
4.- También debe incluir dimensiones, puesto que estas serán utilizada en cálculos posteriores como el de momento.
Pasos a seguir:
1.- Elegir adecuadamente el cuerpo que será utilizado, separarlo del suelo y de todos los demás cuerpos.
2.- Todas las demás fuerzas deberán estar incluidas en el diagrama, estas representan la acción ejercida sobre el objeto
3.- Las magnitudes y direcciones de las fuerzas externas, deben ser señaladas claramente.
4.- También debe incluir dimensiones, puesto que estas serán utilizada en cálculos posteriores como el de momento.
Conexiones de una REESTRUCTURA bidimensional
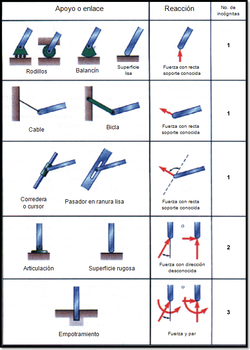
Se dividen en tres tipos:
1) Reacciones equivalentes a una fuerza con una linea de acción conocida: rodillos, balancines, superficies sin fricción, eslabones y cables cortos. Esté tipo de conexión solo pueden impedir el movimiento solo en una dirección.
2) Reacciones equivalentes a una fuerza de magnitud y dirección desconocidas: pernos sin fricción en orificios ajustados, bisagras, superficies rugosas. Pueden evitar la traslación del cuerpo rígido pero no la rotación.
3) Reacciones equivalentes a una fuerza y un par: Restringen al objeto por completo de cualquier movimiento, se pueden reducir a una fuerza y a un par, involucran tres incógnitas.
1) Reacciones equivalentes a una fuerza con una linea de acción conocida: rodillos, balancines, superficies sin fricción, eslabones y cables cortos. Esté tipo de conexión solo pueden impedir el movimiento solo en una dirección.
2) Reacciones equivalentes a una fuerza de magnitud y dirección desconocidas: pernos sin fricción en orificios ajustados, bisagras, superficies rugosas. Pueden evitar la traslación del cuerpo rígido pero no la rotación.
3) Reacciones equivalentes a una fuerza y un par: Restringen al objeto por completo de cualquier movimiento, se pueden reducir a una fuerza y a un par, involucran tres incógnitas.
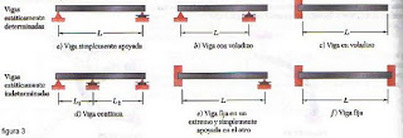
REACCIONES ESTÁTICAMENTE INDETERMINADAS.
RESTRICCIONES PARCIALES.
Cuando los tipos de apoyos usados fueron tales que hicieron imposible el movimiento del cuerpo bajo las cargas dadas o cualquier otra condición en este caso se dice que el cuerpo rígido tiene restriccion completa
EQUILIBRIO DE UN CUERPO SUJETO A DOS FUERZAS
Para que se lleve a cabo el equilibrio cuando 2 fuerzas son sujetas al cuerpo, debe de cumplirse que ambas tengan la misma magnitud, la misma linea de acción y tengan sentidos opuestos. Lo mismo pasa con 3 fuerzas solamente que la linea de acción de las 3 fuerzas debe de ser paralela.
CONEXIONES 3D.

Lo mismo pasa en las conexiones en tres dimensiones solo que en este caso hay 6 incógnitas como máximo.
Los apoyos de bola y cuenca de rotula, solo impiden la traslación en una dirección y ejercen por lo tanto solo una fuerza.
Hay otro tipos de conexiones que solo se usan para impedir traslaciones y su diseño es tal; que puede impedir rotaciones al mismo tiempo.
Por otro lado, si hay mas de 6 incógnitas, existen mas ecuaciones que incógnitas entonces son estáticamente indeterminadas.
Así mismo, cuando las reacciones asociadas con los apoyos son paralelas a la misma linea entonces, el cuerpo rígido tiene restricción impropia.
Los apoyos de bola y cuenca de rotula, solo impiden la traslación en una dirección y ejercen por lo tanto solo una fuerza.
Hay otro tipos de conexiones que solo se usan para impedir traslaciones y su diseño es tal; que puede impedir rotaciones al mismo tiempo.
Por otro lado, si hay mas de 6 incógnitas, existen mas ecuaciones que incógnitas entonces son estáticamente indeterminadas.
Así mismo, cuando las reacciones asociadas con los apoyos son paralelas a la misma linea entonces, el cuerpo rígido tiene restricción impropia.
Capitulo 5
fUERZAS DISTRIBUIDAS. CENTROIDES Y CENTROS DE GRAVEDAD.
Centro de gravedad de un cuerpo bidimensional
|
El centro de gravedad es el punto de aplicación de la resultante de todas las fuerzas de gravedad que actúan sobre las distintas porciones materiales de un cuerpo, de tal forma que el momento respecto a cualquier punto de esta resultante aplicada en el centro de gravedad es el mismo que el producido por los pesos de todas las masas materiales que constituyen dicho cuerpo.
https://www.youtube.com/watch?v=ryvw94YpPIE Vídeo que ayudara a entender un poco mejor lo antes mencionado |
Centroides de Áreas y lineas
Centroides de líneas
Si la simetría del objeto es parecida a la de una barra delgada o alambre, la relación sería con respecto a una línea, el equilibrio de las torcas o momentos de los diferenciales dL con respecto a cada uno de los ejes coordenados x, y y z.
Centroides de superficies o áreas
De manera similar el centroide del área superficial de un objeto, como una placa o un cascarón, se puede determinar subdividiendo el área en elementos dA y calculándolos de esos elementos de área con respecto a cada uno de los ejes coordenados.
https://www.youtube.com/watch?v=IJUd1fQp3ww
Video de linea y areas.
Centroides por integración
Los centroides de una figura bidimensional se refieren al punto en el cual todas las líneas de la figura correspondiente se intersectan unas con otras de tal manera que dividen la figura en dos partes iguales en los momentos equivalentes.
https://www.youtube.com/watch?v=gRBisul7kVI
Teorema del centroide de Pappus
También conocido como teorema de Guldin, teorema de Pappus-Guldin o teorema de Pappus, es el nombre de dos teoremas que relacionan superficie con respecto a sus centroides.
https://www.youtube.com/watch?v=sml6vt8sksM
En este video se explica claramente estos 2 teoremas de manera clara.
Cargas distribuidas en Vigas
En este caso es muy difícil explicarlo con palabras por eso pondré el siguiente link para poder entenderlo mucho mejor y mas fácil
https://www.youtube.com/watch?v=FdyE70e-0TE
https://www.youtube.com/watch?v=gRBisul7kVI
Teorema del centroide de Pappus
También conocido como teorema de Guldin, teorema de Pappus-Guldin o teorema de Pappus, es el nombre de dos teoremas que relacionan superficie con respecto a sus centroides.
https://www.youtube.com/watch?v=sml6vt8sksM
En este video se explica claramente estos 2 teoremas de manera clara.
Cargas distribuidas en Vigas
En este caso es muy difícil explicarlo con palabras por eso pondré el siguiente link para poder entenderlo mucho mejor y mas fácil
https://www.youtube.com/watch?v=FdyE70e-0TE
Capitulo 6
ANÁLISIS de estructuras
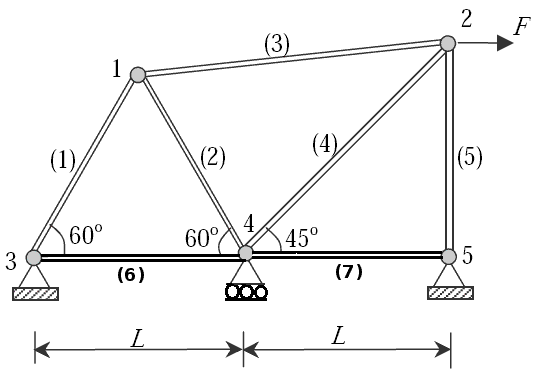
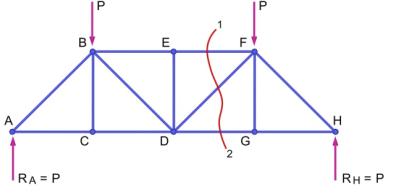
ARMADURAS SIMPLES
Una armadura es una estructura, compuesta de elementos delgados unidos entre sí. Los elementos delgados se suelen denominar los miembros o barras de la armadura, los elementos de unión las juntas o nudos.
Una armadura es una estructura, compuesta de elementos delgados unidos entre sí. Los elementos delgados se suelen denominar los miembros o barras de la armadura, los elementos de unión las juntas o nudos.
|
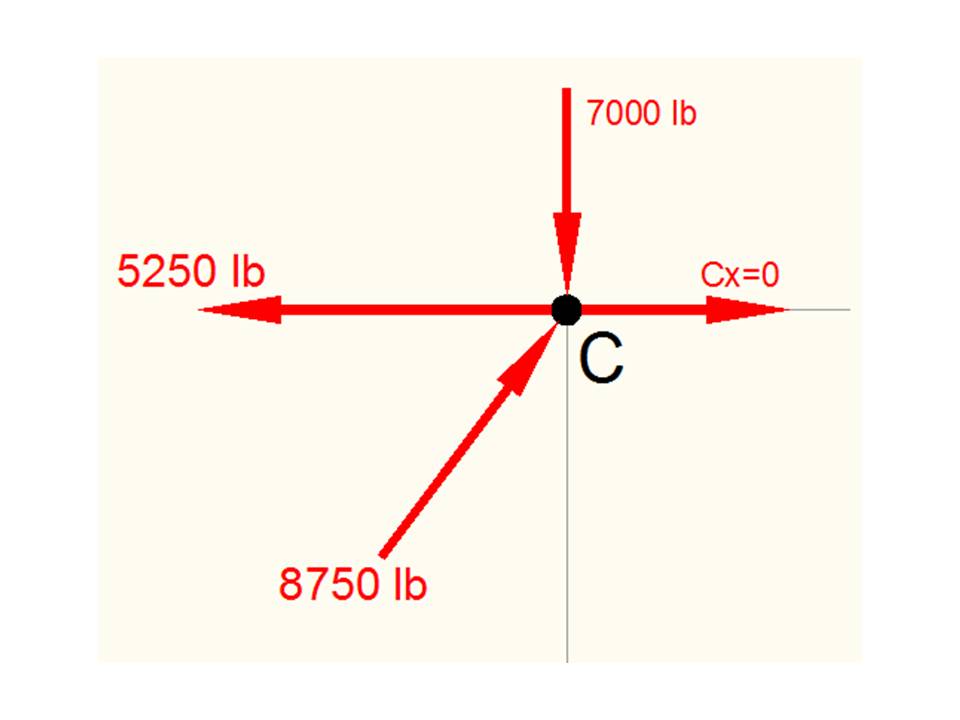
Método de Nodos
El método de las juntas implica dibujar diagramas de cuerpo libre de las juntas de una armadura, una por una, y usar las ecuaciones de equilibrio para determinar las fuerzas axiales en las barras. Por lo general, antes debemos dibujar un diagrama de toda la armadura (es decir, tratar la armadura como un solo cuerpo) y calcular las reacciones en sus soportes.
|
Método de Secciones
El método de las secciones se usa para determinar las cargas que actúan dentro de un cuerpo. Este método se basa en el principio de que si un cuerpo está en equilibrio, entonces cualquier parte del cuerpo está también en equilibrio.
El método de las secciones puede usarse también para “cortar” o seccionar los miembros de toda una armadura. Si la sección pasa por la armadura y se traza el diagrama de cuerpo libre de cualquiera de sus dos partes, entonces puedes aplicar las ecuaciones de equilibrio o esa parte para determinar las fuerzas del miembro en la “sección cortada”. Como sólo tres ecuaciones independientes de equilibrio (ƩFX = 0, ƩFY = 0, ƩM0 = 0) pueden ser aplicadas a la parte aislada de la armadura, trata de seleccionar una sección que, en general, pase por no más de tres miembros en que las fuerzas sean desconcentradas.
Se basa en el hecho de que si una armadura es tomada como un conjunto y está en equilibrio, cualquier parte de ella lo estará. Entonces si se toma una porción de la estructura mediante un corte, de tal manera que no tenga más de tres incógnitas, es posible mediante las tres ecuaciones independientes disponibles en el caso de fuerzas coplanares, determinar las fuerzas en los miembros involucrados en el corte para obtener la solución.
Al aplicar las ecuaciones de equilibrio, debes considerar maneras de escribir las ecuaciones en forma tal que den una solución directa para cada una de las incógnitas, en vez de tener que resolver ecuaciones simultáneas.
Esta capacidad de terminar directamente las fuerzas de un miembro particular de una armadura es una de las ventajas principales del método de las secciones.
El método de las secciones se usa para determinar las cargas que actúan dentro de un cuerpo. Este método se basa en el principio de que si un cuerpo está en equilibrio, entonces cualquier parte del cuerpo está también en equilibrio.
El método de las secciones puede usarse también para “cortar” o seccionar los miembros de toda una armadura. Si la sección pasa por la armadura y se traza el diagrama de cuerpo libre de cualquiera de sus dos partes, entonces puedes aplicar las ecuaciones de equilibrio o esa parte para determinar las fuerzas del miembro en la “sección cortada”. Como sólo tres ecuaciones independientes de equilibrio (ƩFX = 0, ƩFY = 0, ƩM0 = 0) pueden ser aplicadas a la parte aislada de la armadura, trata de seleccionar una sección que, en general, pase por no más de tres miembros en que las fuerzas sean desconcentradas.
Se basa en el hecho de que si una armadura es tomada como un conjunto y está en equilibrio, cualquier parte de ella lo estará. Entonces si se toma una porción de la estructura mediante un corte, de tal manera que no tenga más de tres incógnitas, es posible mediante las tres ecuaciones independientes disponibles en el caso de fuerzas coplanares, determinar las fuerzas en los miembros involucrados en el corte para obtener la solución.
Al aplicar las ecuaciones de equilibrio, debes considerar maneras de escribir las ecuaciones en forma tal que den una solución directa para cada una de las incógnitas, en vez de tener que resolver ecuaciones simultáneas.
Esta capacidad de terminar directamente las fuerzas de un miembro particular de una armadura es una de las ventajas principales del método de las secciones.
Capitulo 7
FUERZAS EN VIGAS Y CABLES
Definición de momento flexionante
Un diagrama de fuerzas cortantes o un diagrama de momentos flexionantes es una gráfica que muestra la magnitud de la fuerza cortante o momento flexionante a lo largo de la viga. Se denomina momento flector al momento de fuerza resultante de una distribución de tensiones sobre una sección transversal de un prisma mecánico flexionado o una placa que es perpendicular al eje longitudinal a lo largo del que se produce la flexión.
Es un requisito típico en vigas y pilares, también en losas ya que todos estos elementos suelen deformarse predominantemente por flexión. El momento flector puede aparecer cuando se someten estos elementos a la acción un momento (torque) o también de fuerzas puntuales o distribuidas.
El momento flexionante en cualquier sección de la viga tiene igual magnitud, pero dirección opuesta a la suma algebraica de los momentos respecto a la sección que se esté considerando de todas las cargas externas, y reacciones en los apoyos que actúan sobre cualquiera de los dos lados de esta sección.
Un diagrama de fuerzas cortantes o un diagrama de momentos flexionantes es una gráfica que muestra la magnitud de la fuerza cortante o momento flexionante a lo largo de la viga. Se denomina momento flector al momento de fuerza resultante de una distribución de tensiones sobre una sección transversal de un prisma mecánico flexionado o una placa que es perpendicular al eje longitudinal a lo largo del que se produce la flexión.
Es un requisito típico en vigas y pilares, también en losas ya que todos estos elementos suelen deformarse predominantemente por flexión. El momento flector puede aparecer cuando se someten estos elementos a la acción un momento (torque) o también de fuerzas puntuales o distribuidas.
El momento flexionante en cualquier sección de la viga tiene igual magnitud, pero dirección opuesta a la suma algebraica de los momentos respecto a la sección que se esté considerando de todas las cargas externas, y reacciones en los apoyos que actúan sobre cualquiera de los dos lados de esta sección.
CAPITULO 8
INERCIA
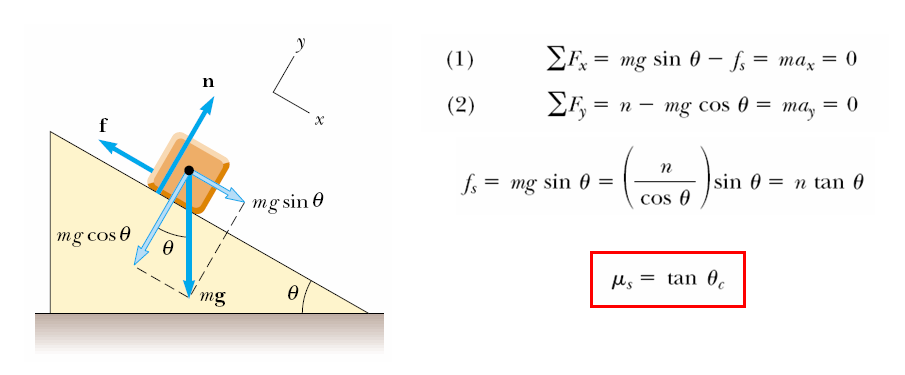
Leyes de la fricción seca. Coeficientes de fricción.
La fricción es la fuerza de resistencia al movimiento relativo de las superficies sólidas, las capas de fluido, y elementos materiales deslizantes el uno contra el otro. Hay varios tipos de fricción:
La fricción no es en sí misma una fuerza fundamental sino que surge de las fuerzas electromagnéticas fundamentales entre las partículas cargadas que constituyen las dos superficies en contacto. La complejidad de estas interacciones hace que el cálculo de la fricción de los primeros principios imposible y requiere el uso de métodos empíricos para el análisis y el desarrollo de la teoría.
La fricción es la fuerza de resistencia al movimiento relativo de las superficies sólidas, las capas de fluido, y elementos materiales deslizantes el uno contra el otro. Hay varios tipos de fricción:
- Fricción en seco resiste el movimiento lateral relativo de dos superficies sólidas en contacto. Fricción seca se subdivide en fricción estática entre las superficies que no se mueven, y la fricción cinética entre superficies móviles.
- La fricción del fluido describe la fricción entre las capas dentro de un fluido viscoso que se mueven uno respecto al otro.
- Fricción lubricada es un caso de la fricción del fluido en un fluido separa dos superficies sólidas.
- Fricción de la piel es un componente de fricción, la fuerza de resistencia al movimiento de un cuerpo sólido a través de un fluido.
- La fricción interna es la resistencia a la fuerza de movimiento entre los elementos que componen un material sólido, mientras que se somete a deformación.
La fricción no es en sí misma una fuerza fundamental sino que surge de las fuerzas electromagnéticas fundamentales entre las partículas cargadas que constituyen las dos superficies en contacto. La complejidad de estas interacciones hace que el cálculo de la fricción de los primeros principios imposible y requiere el uso de métodos empíricos para el análisis y el desarrollo de la teoría.
Leyes de la fricción seca
Las propiedades elementales de la fricción de deslizamiento fueron descubiertos por el experimento en el 15 al siglo 18 y se expresaron como tres leyes empíricas:
- Primera Ley Amontons ': La fuerza de fricción es directamente proporcional a la carga aplicada.
- Segunda Ley Amontons ': La fuerza de fricción es independiente del área aparente de contacto.
- Ley de fricción de Coulomb: fricción cinética es independiente de la velocidad de deslizamiento.
Fricción en seco resiste el movimiento lateral relativo de dos superficies sólidas en contacto. Los dos regímenes de fricción seca son "fricción estática" entre las superficies que no se mueven, y la fricción cinética entre superficies móviles.
Fricción de Coulomb, el nombre de Charles-Augustin de Coulomb, es un modelo aproximado para calcular la fuerza de fricción en seco. Se rige por la ecuación:
- es la fuerza de fricción ejercida por cada superficie en el otro. Es paralela a la superficie, en una dirección opuesta a la fuerza neta aplicada.
- es el coeficiente de fricción, que es una propiedad empírica de los materiales de contacto,
- es la fuerza normal ejercida por cada superficie sobre la otra, dirigida perpendicular a la superficie.
La fuerza de fricción siempre se ejerce en una dirección que se opone al movimiento o movimiento potencial entre las dos superficies. Por ejemplo, una piedra de curling deslizante a lo largo del hielo experimenta una fuerza cinética frenarla. Para un ejemplo de movimiento del potencial, las ruedas de un coche acelerando experimentan una fuerza de fricción apuntando hacia delante, y si no lo hacían, las ruedas giraban, y la goma se deslice hacia atrás a lo largo de la acera. Tenga en cuenta que no es la dirección del movimiento del vehículo que se oponen, que es la dirección de deslizamiento entre el neumático y la carretera.

Coeficiente de fricción
El coeficiente de fricción, a menudo simbolizado por la letra griega, es un valor escalar adimensional que describe la relación de la fuerza de fricción entre dos cuerpos y la fuerza de presión juntos. El coeficiente de fricción depende de los materiales utilizados, por ejemplo, de hielo sobre el acero tiene un bajo coeficiente de fricción, mientras que el caucho en el pavimento tiene un alto coeficiente de fricción. Los coeficientes de fricción gama de casi cero a más de uno. Bajo buenas condiciones, por ejemplo, un neumático en concreto puede tener un coeficiente de fricción de 1,7.
El coeficiente de fricción, a menudo simbolizado por la letra griega, es un valor escalar adimensional que describe la relación de la fuerza de fricción entre dos cuerpos y la fuerza de presión juntos. El coeficiente de fricción depende de los materiales utilizados, por ejemplo, de hielo sobre el acero tiene un bajo coeficiente de fricción, mientras que el caucho en el pavimento tiene un alto coeficiente de fricción. Los coeficientes de fricción gama de casi cero a más de uno. Bajo buenas condiciones, por ejemplo, un neumático en concreto puede tener un coeficiente de fricción de 1,7.
Cuñas
La cuña es una máquina simple que consiste en una pieza de madera o de metal con forma de prisma triangular. Técnicamente es un doble plano inclinado portátil. Sirve para hender o dividir cuerpos sólidos, para ajustar o apretar uno con otro, para calzarlos o para llenar alguna raja o círculo.
El funcionamiento de las cuñas responden al mismo principio del plano inclinado. Al moverse en la dirección de su extremo afilado, la cuña genera grandes fuerzas en sentido perpendicular a la dirección del movimiento.
Ejemplos muy claros de cuña son: hachas, cinceles y clavos aunque, en general, cualquier herramienta afilada, como el cuchillo o el filo de lastijeras, puede actuar como una cuña.
La cuña es una máquina simple que consiste en una pieza de madera o de metal con forma de prisma triangular. Técnicamente es un doble plano inclinado portátil. Sirve para hender o dividir cuerpos sólidos, para ajustar o apretar uno con otro, para calzarlos o para llenar alguna raja o círculo.
El funcionamiento de las cuñas responden al mismo principio del plano inclinado. Al moverse en la dirección de su extremo afilado, la cuña genera grandes fuerzas en sentido perpendicular a la dirección del movimiento.
Ejemplos muy claros de cuña son: hachas, cinceles y clavos aunque, en general, cualquier herramienta afilada, como el cuchillo o el filo de lastijeras, puede actuar como una cuña.
CAPITULO 9
FUERZAS DISTRIBUIDAS. MOMENTOS DE INERCIA.
Momento de Inercia
El momento de inercia (símbolo I) es una medida de la inercia rotacional de un cuerpo. Cuando un cuerpo gira en torno a uno de los ejes principales de inercia, la inercia rotacional puede ser representada como una magnitud escalar llamada momento de inercia. Sin embargo, en el caso más general posible la inercia rotacional debe representarse por medio de un conjunto de momentos de inercia y componentes que forman el llamado tensor de inercia. La descripción tensorial es necesaria para el análisis de sistemas complejos, como por ejemplo en movimientos giroscópicos.
El momento de inercia refleja la distribución de masa de un cuerpo o de un sistema de partículas en rotación, respecto a un eje de giro. El momento de inercia sólo depende de la geometría del cuerpo y de la posición del eje de giro; pero no depende de las fuerzas que intervienen en el movimiento.
El momento de inercia desempeña un papel análogo al de la masa inercial en el caso del movimiento rectilíneo y uniforme. Es el valor escalar del momento angular longitudinal de un sólido rígido.
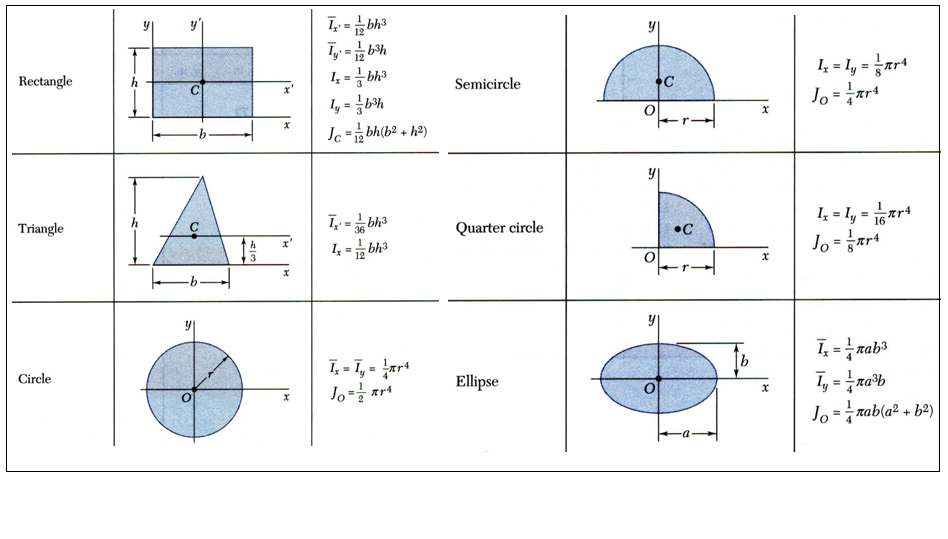
Pasos para calcular el momento de inercia de áreas compuestas
El momento de inercia (símbolo I) es una medida de la inercia rotacional de un cuerpo. Cuando un cuerpo gira en torno a uno de los ejes principales de inercia, la inercia rotacional puede ser representada como una magnitud escalar llamada momento de inercia. Sin embargo, en el caso más general posible la inercia rotacional debe representarse por medio de un conjunto de momentos de inercia y componentes que forman el llamado tensor de inercia. La descripción tensorial es necesaria para el análisis de sistemas complejos, como por ejemplo en movimientos giroscópicos.
El momento de inercia refleja la distribución de masa de un cuerpo o de un sistema de partículas en rotación, respecto a un eje de giro. El momento de inercia sólo depende de la geometría del cuerpo y de la posición del eje de giro; pero no depende de las fuerzas que intervienen en el movimiento.
El momento de inercia desempeña un papel análogo al de la masa inercial en el caso del movimiento rectilíneo y uniforme. Es el valor escalar del momento angular longitudinal de un sólido rígido.
Pasos para calcular el momento de inercia de áreas compuestas
- Dividir el área compuesta en varias partes que sean simples
- Determinar las áreas de las partes, designarlas por .
- Determinar las coordenadas del centro de masas de estas partes con respecto a los ejes X e Y. Y calcular el cdm de toda la figura formada por todas las áreas parciales anteriores.
- Calcular las distancias de los cdm de cada área respecto al cdm total de la figura.
- Calcular los momentos de inercia de las partes respecto a sus ejes de centro de masas (que serán paralelos a x e y). Designar como: e , para el área i-ésima.
- Calcular el momento de inercia de cada parte respecto a los ejes x e y aplicando el teorema del eje paralelo, es decir, el teorema de Steiner